Rafael, Vladimir,
I am still experimenting with priorities and if I don’t take into account the unusual effect of the NLT contains on priorities discussed in a separate thread, I find that when it comes to activity priorities, everything is quite logical (at least with the Standard resource leveling method). I have observed the following behavior and just checking that these are correct observations (Note I was testing only with positive priorities).
But 1st some definitions to make explanation simple
Highest Phase-imposed Priority (HPP) – highest priority of all phases of all levels up for a specific Activity.
Highest Successors Critical Chain Phase-imposed Priority (HSCCPP) – highest of HCPPs of all succeeding activities in the critical chain of a specific activity (if the Activity is not in a critical chain, then is the not used)
Effective Phase-Dependent Priority (EPDP) of an activity - maximum between Activities’ HPP and HSCCPP
Highest Successors Critical Chain Activity Priority (HSCCAP) – highest of Activity Priorities of all succeeding activities in the critical chain of a specific activity (if the Activity is not in a critical chain, then is the not used)
Effective Activity Priority (EAP) – maximum of Activity Priority and it’s HSCCAP
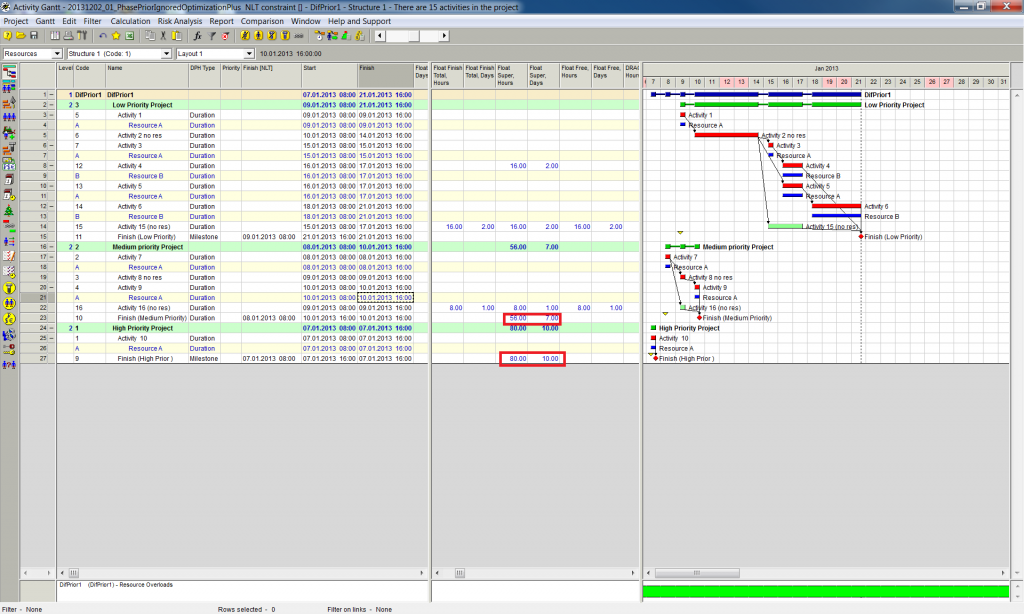
So, the situation, when 2 activities (A1 and A2) conflict over the same constrained resource Spider uses the following rules:
1st Spider looks at of EPDP ignoring activity priority. In another words any task with Effective Phase-Dependent Priority (EPDP) > 0 has always has a higher priority, then a task which EPDP=0, regardless of it’s Effective Activity Priority (EAP). Task with a higher EPDP has a higher priority, than a task with lower EPDP.
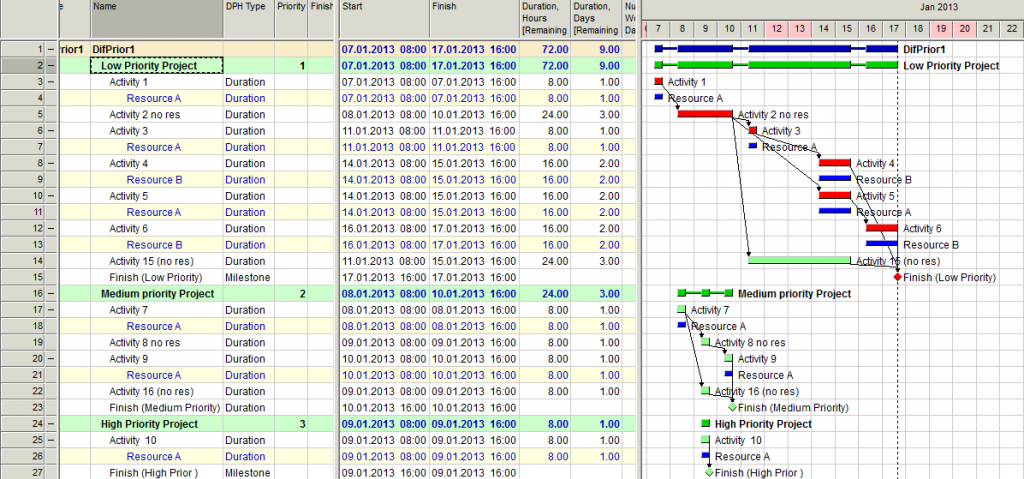
If EPDP empty or equal for both Activities, then Spider compares Effective Activity Priority (EAP) of tasks.
Is it how priorities are meant to work for Standard algorithm?













Replies